Table of Contents
Context: The Indian Space Research Organisation (ISRO) accomplished the third landing experiment of the Reusable Launch Vehicle (RLV LEX-03) named ‘Pushpak’.
Pushpak – ISRO’s Reusable Launch Vehicle
- Pushpak is India’s futuristic Reusable Launch Vehicle.
- Inspiration: The rocket’s name is inspired by the ‘Pushpak Viman’ from the Ramayana, known as the Vehicle of Kuber, the Lord of Wealth.
- Design: It is designed as an all-rocket, fully reusable single-stage-to-orbit (SSTO) vehicle.
- Technology Incorporation: Pushpak incorporates several major elements, including the X-33 advanced technology demonstrator, the X-34 testbed technology demonstrator, and the upgraded DC-XA flight demonstrator.
- Upper Stage: The most expensive part, the upper stage, which houses all the costly electronics, is made reusable by safely bringing it back to Earth.
- Future Capabilities: Pushpak could eventually refuel in-orbit satellites or retrieve satellites from orbit for refurbishment.
- Space Debris: It is a step towards India’s aim of “minimising space debris.”
- Future Goals: Pushpak sets the stage for establishing the Bhartiya Antariksh Station by 2035.
| Reusable Landing Vehicle (RLV) |
|
About the ISRO’s Reusable Launch Vehicle landing Experiment
- Autonomous Landing Capability: Following the success of RLV LEX-01 and LEX-02 missions, RLV LEX-03 re-demonstrated the autonomous landing capability of the RLV under more challenging release and wind conditions.
- Release from Helicopter: Pushpak, ISRO’s winged vehicle, was released from an Indian Air Force Chinook helicopter at an altitude of 4.5 km.
- Autonomous Manoeuvres: From the release point 4.5 km away, Pushpak autonomously executed cross-range correction manoeuvres, approached the runway, and performed a precise horizontal landing at the runway centerline.
- Landing Velocity: Due to its low lift-to-drag ratio aerodynamic configuration, the landing velocity exceeded 320 kmph, compared to 260 kmph for a commercial aircraft and 280 kmph for a typical fighter aircraft.
- The vehicle’s velocity was reduced to nearly 100 kmph using its brake parachute, after which landing gear brakes were employed for deceleration.
- Stable Ground Roll: During the ground roll phase, Pushpak utilised its rudder and nose-wheel steering system to autonomously maintain a stable and precise ground roll along the runway.
- Simulation of Space Return Conditions: This mission simulated the approach and landing interface and high-speed landing conditions for a vehicle returning from space, reaffirming ISRO’s expertise in acquiring critical technologies required for the development of an RLV.
- Guidance Algorithm Validation: The advanced guidance algorithm catering to longitudinal and lateral plane error corrections, essential for future Orbital Re-entry Missions, was validated through this mission.
- Sensors Used: The LEX used sensors such as an inertial sensor, radar altimeter, flush air data system, and NavIC. Notably, the LEX-03 mission reused the winged body and flight systems from the LEX-02 mission without any modifications, demonstrating the robustness of ISRO’s design to reuse flight systems.
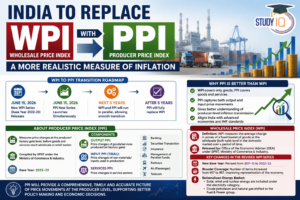 India to Replace WPI with PPI: Key Chang...
India to Replace WPI with PPI: Key Chang...
 Blue Bond: Meaning, Features, Significan...
Blue Bond: Meaning, Features, Significan...
 World Bicycle Day 2026: Theme, History, ...
World Bicycle Day 2026: Theme, History, ...